Over the last few months we've been working on a 4-input coherent RTL-SDR called 'HydraSDR' that is designed to be a low cost way to get into applications such as RF direction finding, passive radar, beam forming and more. It can also be used as a standard 4-channel SDR for monitoring multiple frequencies as well.
Phase coherent RTL-SDRs have been worked on and demonstrated several times over the past few years, but we've been disappointed to find that so far there hasn't been any easy way to replicate these experiments. The required hardware has been difficult to build and access, and the software has been kept as unreleased closed source or has been too complicated to install and use. With HydraSDR we aim to change that by making phase coherent applications easier to access and run by providing ready to use hardware and software.
Thanks to our developer Tamás Peto, a PhD student at Budapest University of Technology and Economics whom we hired via the ad in our previous post, and the Othernet (formerly Outernet) engineering team who are our partners on this project, we've been able to build a working system, and demonstrate coherent direction finding and passive radar working as expected (demo videos below). We plan to eventually release Tamás' code as open source so that the entire community can benefit and build on it. Also if HydraSDR turns a profit, we plan to reinvest some of the profits into continually improving the software and expanding the list of use cases.
At the moment we are finalizing our prototype, and plan to begin final production within the next 2-3 months.
If you have any interest in HydraSDR, please sign up to our Hydra mailing list. This will help us gauge how many units to produce and will affect the final pricing. If you've already signed up to our weekly posts list, please sign up to this list too as it's a different list. Subscribers to this list will be the first to know when Hydra goes on preorder, and the first 100 sales will receive a discounted price. We expect to begin taking preorders in within a month and to ship 1-2 months after preorders begin.
Direction Finding
HydraSDR can be used to find the bearing towards a signal using it's coherent direction finding capabilities. The software by Tamás currently implements several direction finding algorithms such as Bartlett, Capon, Maximum Entropy (MEM) and MUSIC. In the video below we show a quick test of the direction finding system working with a HackRF being used as a signal source, and four dipole antennas connected to HydraSDR in a linear array. The MUSIC algorithm is used.
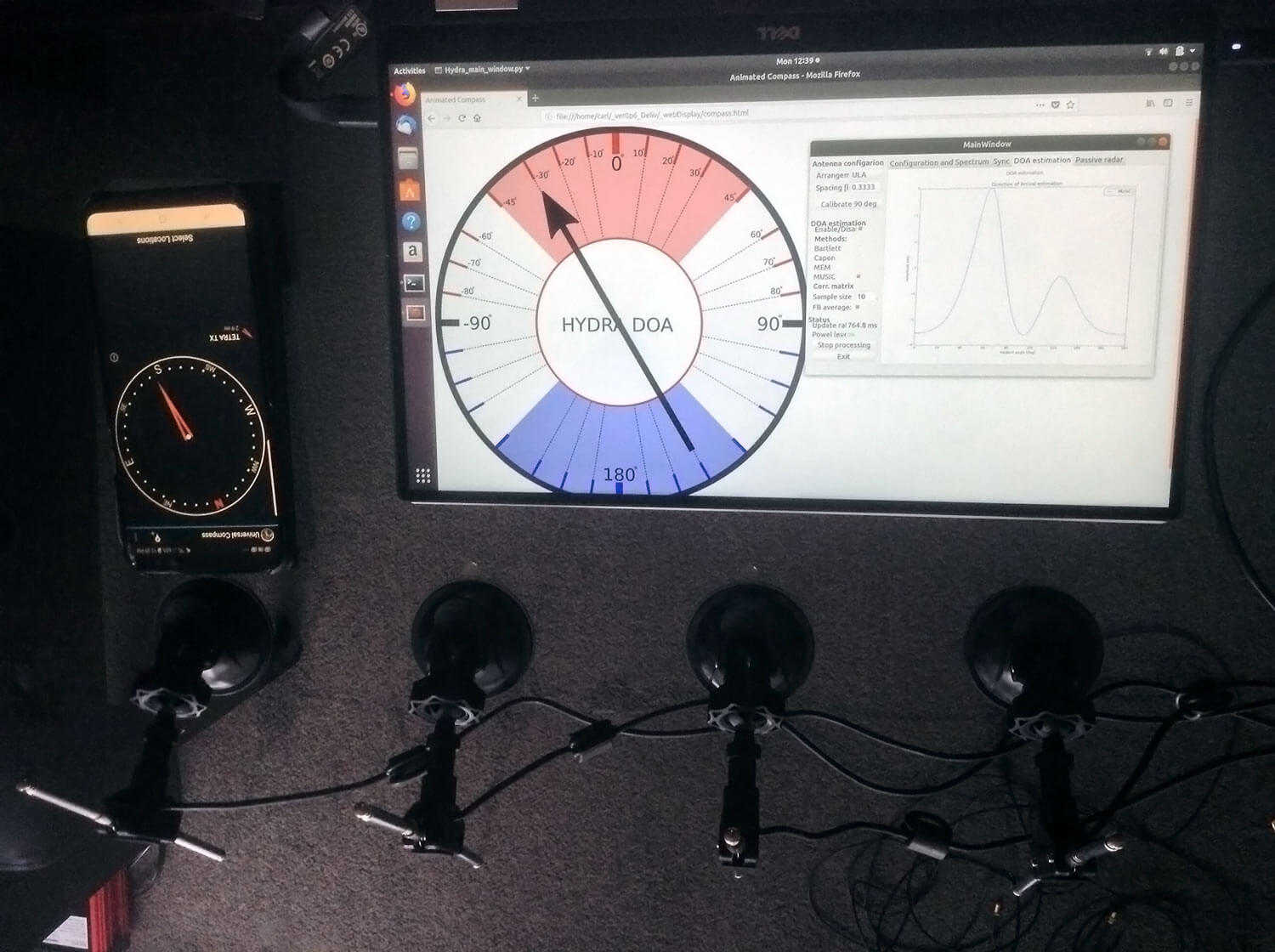
In the image below we also attempted to find the direction towards a known TETRA transmitter. We were able to confirm the direction with an Android compass app that points towards the known transmitter location. As the two angles match, we can be confident that Hydra is finding the correct direction to the transmitter.
Passive Radar
HydraSDR can also be used for passive radar. Normal radar systems work by transmitting a pulse of RF energy, and listening to the reflections from objects like planes, cars and ships. Passive radar works by using already existing transmitters such as those for FM/TV and listening for reflections that bounce of objects.
With a simple passive radar system you need two directional antennas and two coherent receivers. One antenna points at the transmitting 'reference' tower, and the other at the 'surveillance' area where you want to listen for reflections. It's important to try and keep as much of the reference signal out of the surveillance antenna as possible, which is why directional antennas like Yagi's are used.
The result is a doppler vs time delay graph, where the reflection of aircraft, cars, ships and other objects can be seen. The doppler gives you the speed of the object relative to your antenna and the transmitting tower, and the time delay gives you the distance relative to your antenna and the transmitter tower.
Below is an example time lapse video of HydraSDR being used for passive radar. The reference antenna points towards a DVB-T transmitter at 588 MHz, and the surveillance antenna overlooks a small neighborhood, with aircraft sometimes flying over. The antennas we used were two very cheap TV Yagis.
You can constantly see the reflections from vehicles at small doppler values (low speeds), and every now and then you see an aircraft reflection which shows up at much higher doppler (speed) and further time delay (distance) points.
More information about HydraSDR
HydraSDR includes:
- 4x Coherent R820T2 based RTL-SDR dongles with standard 24 MHz - 1.7 GHz frequency range
- On board GPIO switched wide band noise source for sample sync and phase calibration
- Special phase calibration PCB for 4x inputs. Required to make the Hydra phase coherent.
- On board USB Hub, so only one USB port is required on the PC
- Shielded metal enclosure
HydraSDR can also be extended to 8x receivers by daisy chaining two boards together, so that their clocks and noise sources are connected. We've also taken into account undesirable effects such as heat related PLL drift which can be an issue for phase coherence.
At the moment we are also investigating whether singleboard computers like the Raspberry Pi 3 or Tinkerboard can be used, and there will be a header available for powering them via the Hydra PCB.
Once released we plan to have extensive tutorials and documentation that show exactly how to set up and replicate direction finding and passive radar experiments with low cost antennas.
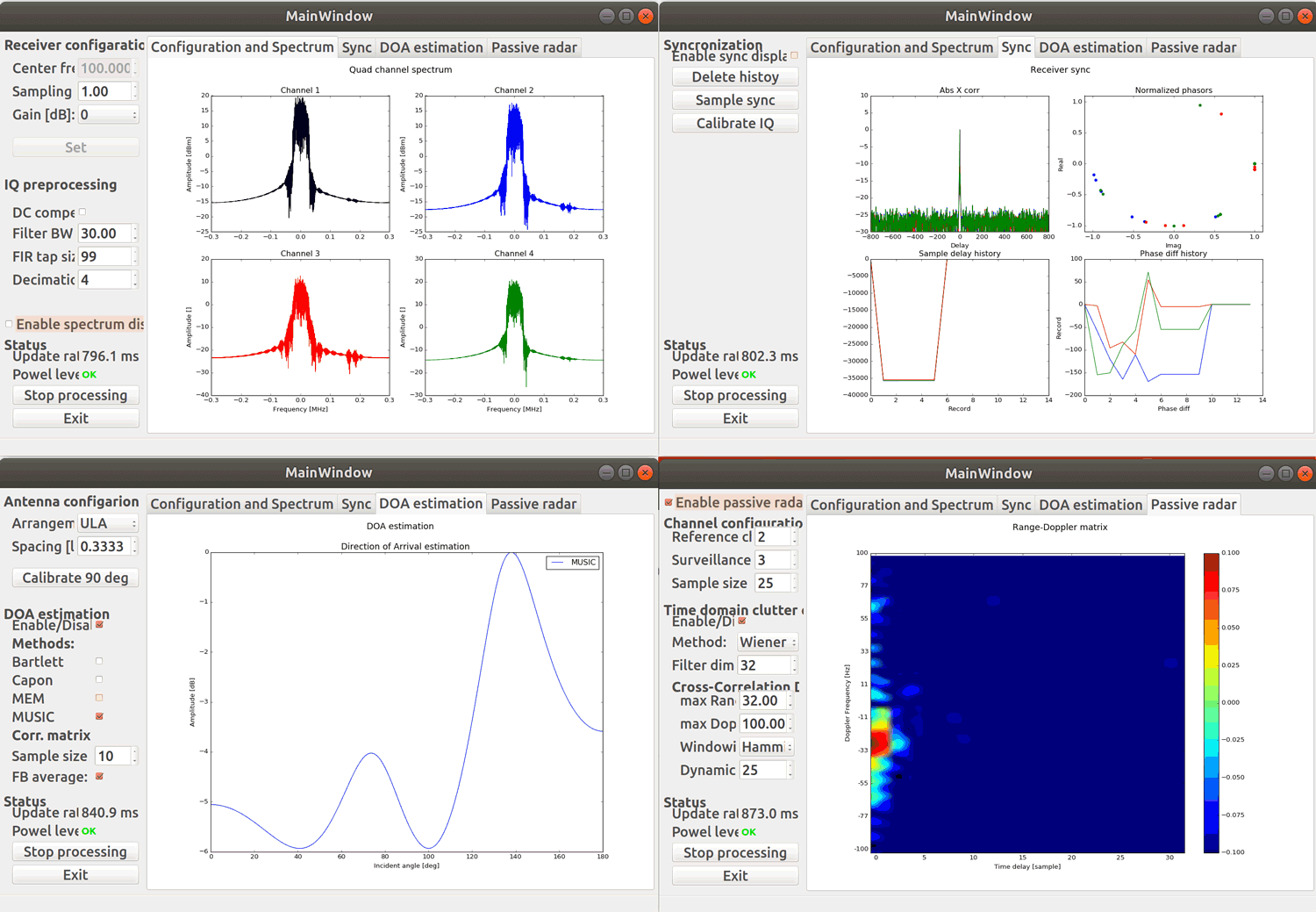
Screenshots of HydraSDR software:
Remember, if you're interested please sign up to the HydraSDR mailing list for announcements and the chance to get in early with the cheaper first 100 units.
The post HydraSDR Preview: A 4x Coherent RTL-SDR for Direction Finding, Passive Radar and more appeared first on rtl-sdr.com.